Improvements for the Nonlinear Filtering Algorithms and their Application
The data is inevitably mixed with noise because of incomplete data and sensors’ limited accuracy or resolution. However, these seemingly trivial noises seriously hinder people’s un- derstanding and utilization of the data. At present, there are relatively mature algorithms to filter noise. This paper will deduce from the fundamental mathematical knowledge, then explore the stability and optimization methods of Kalman Filter and Particle Filter.
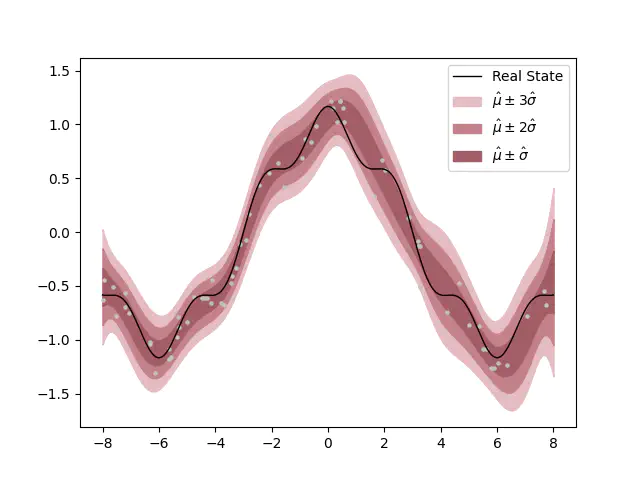
In the second half of the project, I briefly introduced GP and adopted the current mainstream HMC method to infer hyperparameters. I realize that utilizing the sequential nature of the data can significantly improve the algorithm’s speed, so it is valuable to treat the hyperparameters inference in GP as a sequential case (data arrives online). My experiment has proved that SMC is thrift by contrast to HMC. This project does not involve the parallelism of SMC. If asynchronous computing is used, the efficiency can be improved more. GP with SMC update will also encounter the problem of sample impoverishment. We can choose to jitter hyperparameters sample. Meanwhile, we have to recalculate the covariance matrix and its inverse. But overall, the SMC method will still be a lot faster than running the HMC.
Wei Hong
Student in MSc Mathematical Sciences
Barney is a graduate student of MSc Mathematical Sciences in University of Oxford.